ROBOSOCCER CHALLENGE
19th-20th June, 2026
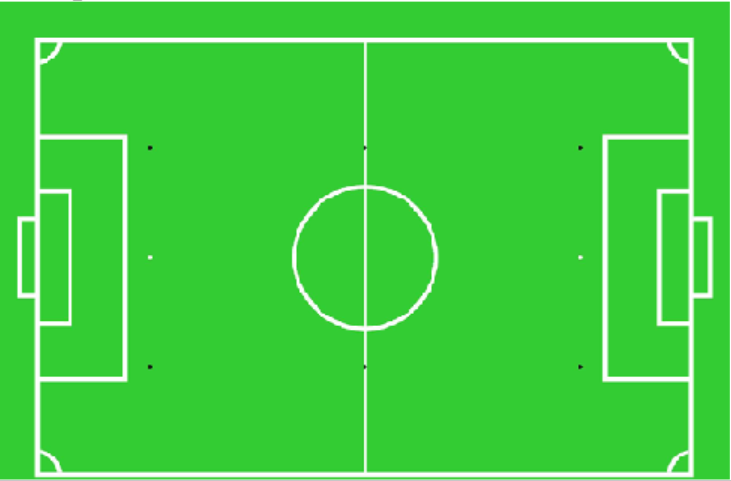
RoboSoccer is one of the most famous challenges of TechnoXian, a world robotics championship series. Teams of 1 controlled bots chase a ball around a big size arena with the aim to kick more goals than the opponent. This game gives the opportunity for youngsters to solve robotic challenges and build creative bot while learning science, technology, engineering, and maths. The most rewarding part of designing bots is that students have fun, work together as a team, and learning occurs as naturally as breathing air
Eligibility Criteria
- Jr. Category : Robo-clubs/ Schools or individuals may nominate. Participants’ age should be between 6 to 10 years.
- Sr. Category : Robo-clubs/ Schools or individuals may nominate. Participants’ age should be between 11 to 16 years.
How To Get on RoboSoccer Challenge
- A match is played by two soccer teams, with each team consisting of 3 bots and one of which may be the keeper. Number of bots during the match could be flexible depending ton the number of teams but at least each soccer team will have 1 bot and maximum 3 bots.
- Construct a team of a minimum of 3 and a maximum of 8 members.
- Batteries must be sealed, immobilised electrolyte type (gel cell, lithium, NiCad, or dry cells).
- The electric voltage anywhere in the machine can be used up to 24V DC at any point in time for each robot.
- The robot must not emit infrared light. However, optical sensors (e.g. infrared-distance-sensors) may be used if they do not affect other robots.
- Infrared light-reflecting materials must not be used on the outside. If robots are painted, they must be painted matte. Minor parts that reflect infrared light could be used only if other robots are not affected. Robots must not produce magnetic interference for other robots on the field.
- If a team claims that their robot is affected by the other team’s robot in any way they must show proof/evidence of the interference. Any interference must be confirmed by a Referee if a claim is placed by the other team.
The participating bots should be wireless and controlled remotely. It can be circular / Rectangular in style. Bot must fit inside a 20 centimetres wide and 40 centimetres high cube at any point in time. Maximum weight should not be more than 3 Kgs. Additionally, the top of the robot must adhere to the standard pattern size and surface constraints. Dribbling devices that actively exert spin on the ball, which keep the ball in contact with the robot are permitted under certain conditions.. Participants need to ensure:
- Each team should have two robots for the full tournament. The substitution of robots during the competition within the team or with other teams is forbidden.
- If a team claims that their robot is affected by the other team’s robot in any way they must show proof/evidence of the interference. Any interference must be confirmed by a Referee if a claim is placed by the other team..
· The robot can be manually controlled using a Remote-control system.
The participating bots should be wireless and controlled remotely. It can be circular / Rectangular in style. Bot must fit inside a 20 centimetres wide and 40 centimetres high cube at any point in time. Maximum weight should not be more than 7 Kgs. Additionally, the top of the robot must adhere to the standard pattern size and surface constraints. Dribbling devices that actively exert spin on the ball, which keep the ball in contact with the robot are permitted under certain conditions.. Participants need to ensure:
- Each team should have two robots for the full tournament. The substitution of robots during the competition within the team or with other teams is forbidden.
- If a team claims that their robot is affected by the other team’s robot in any way they must show proof/evidence of the interference. Any interference must be confirmed by a Referee if a claim is placed by the other team..
· The robot can be manually controlled using a Remote-control system.
Following the one-on-one challenge, the competition takes a turn towards collaboration! Here's what happens:
Team Formation:
l The judges randomly select teams.
l Each team will consist of two previously competing robots (one from each team that played in the one-on-one round).
Strategy Session:
l The newly formed teams are given a short period to strategics.
l This is their chance to discuss and plan their approach for the upcoming two-vs-two match.
Here are some key aspects they might consider:
Strengths and Weaknesses: Analyse the capabilities of each robot (their own and their teammate's) to identify strengths (e.g., speed, kicking power) and weaknesses (e.g., turning radius, sensor limitations).
- Combined Play-style: Discuss how to best utilise each robot's strengths and compensate for weaknesses. Will they focus on a defensive or offensive strategy?
- Communication: Decide on a basic communication method (if possible) to signal plays or warn of dangers during the match. This could be per-programmed actions triggered by sensors or simple light signals.
Facing the Opponent:
l After strategics, the two newly formed teams will face each other in a two-vs-two match.
l The robots will need to leverage their combined strengths and their newly devised strategy to outscore their opponents.
RoboSoccer Challenge: One vs. One
Match Format:
This format applies to the initial round where robots compete individually.
- Two robots will face off in a one-on-one match.
- The total match duration is 2 minutes.
- There's no break in this round.
- The game clock runs continuously.
Pre-Match:
- Robots must be ready for inspection 5 minutes before the match starts.
- Late arrival may result in disqualification at the referee's discretion.
One vs. One Dynamics:
This round emphasises individual robot prowess. Key factors include:
- Speed and agility: Robots compete to reach the ball first and manoeuvre around the opponent.
- Ball handling: Precise kicking and dribbling skills are crucial for scoring and maintaining control.
RoboSoccer Challenge: Two vs. Two (Revised)
Match Format:
- Two teams will compete, each with one autonomous/manual robot.
- The total match duration is 10 minutes divided into two halves of 5 minutes each.
- There will be a 1.5-minute break between halves.
- The game clock runs continuously (except for referee intervention).
Pre-Match:
- Teams must report to the referee 5 minutes before the match starts.
- Being at the inspection table doesn't count towards this time.
- Late arrival may result in a penalty of one goal per minute at the referee's discretion.
- If a team doesn't report within 5 minutes, they forfeit the game, and the opposing team wins 5-0.
Two vs. Two Dynamics:
This revised format changes the dynamic from a three-on-three to a more strategic two-on-two battle. Each robot will need to:
- Cover more ground: With only one teammate, each robot needs to be more versatile, covering both offence and defence as needed.
- Focus on individual skills: Since there are fewer robots on the field, individual speed, agility, and ball handling become even more crucial.
- Adaptive strategies: Robots must adapt their strategies based on the opponent's movements and tactics.
This format creates a faster-paced and more demanding competition, pushing the robots' capabilities to their limit!
The judge will meet the team to discuss their programming and design approach and judging will result in awarding the team points upon:
- The clarity of the team code and design approach
- The team demonstration of the code and design
- Validating teamwork and collaboration during developing the team programming and robot design
- Validate whether the concepts presented are primarily the result of the team's brainstorming efforts or not.
This score will promote the team to win a "ROBOT DESIGN & PROGRAMMING AWARD"